International Journal of Astronautics and Aeronautical Engineering
(ISSN: 2631-5009)
Volume 3, Issue 1
Research Article
DOI: 10.35840/2631-5009/7513

Article Formats
Feed-Forward Control for Retrieval Mode of Space Tethered Systems
Table of Content
Figures
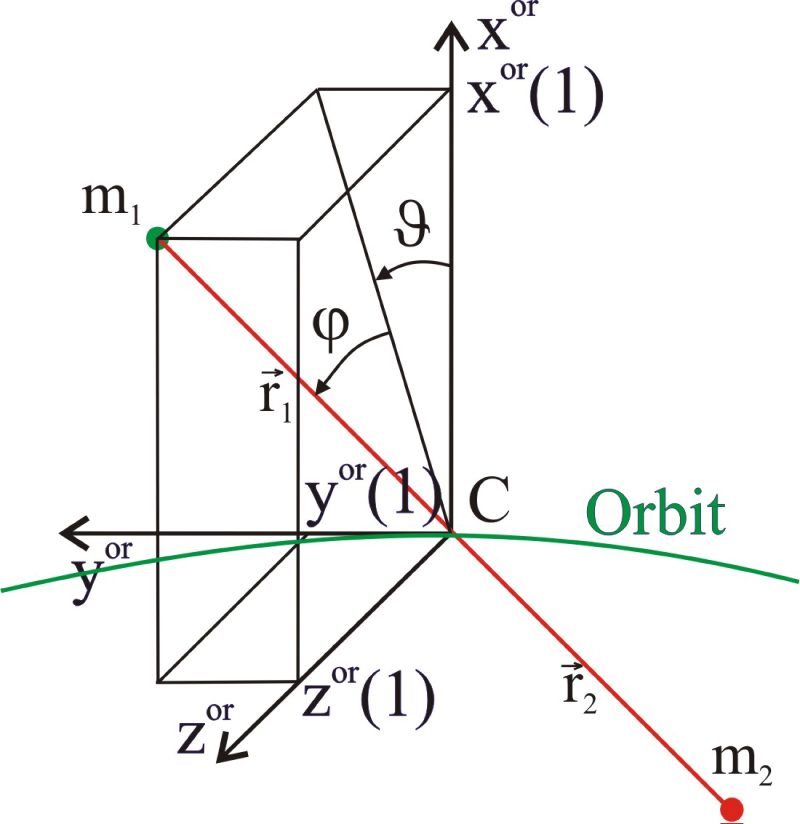
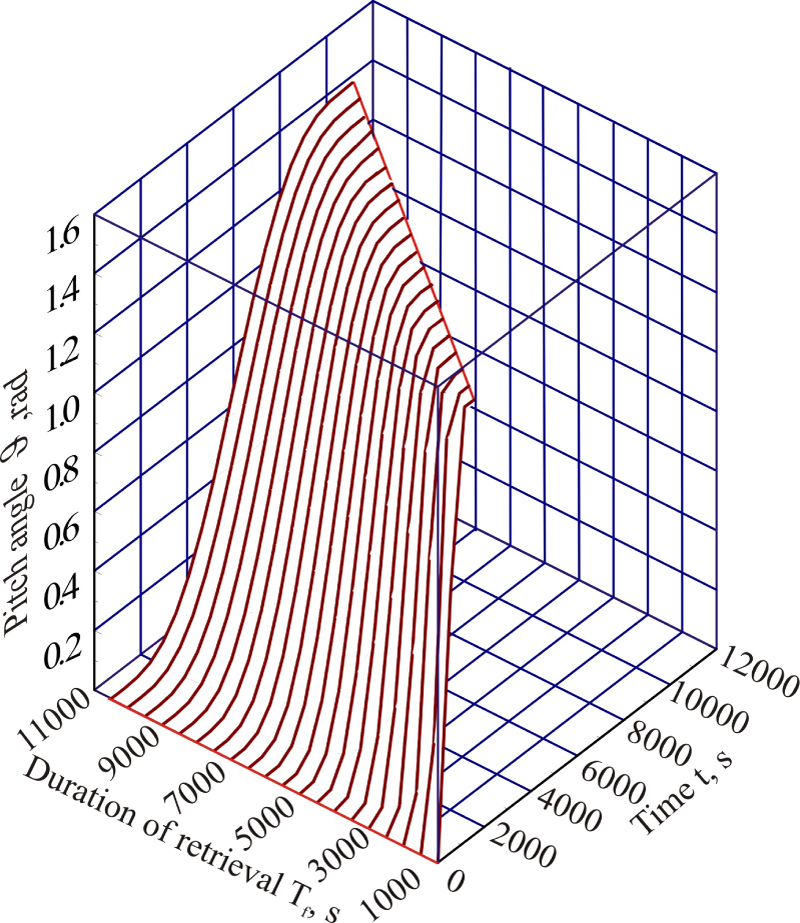
Figure 2: rogrammed law for pitch...
Programmed law for pitch angle during retrieval vs. retrieval duration and time.
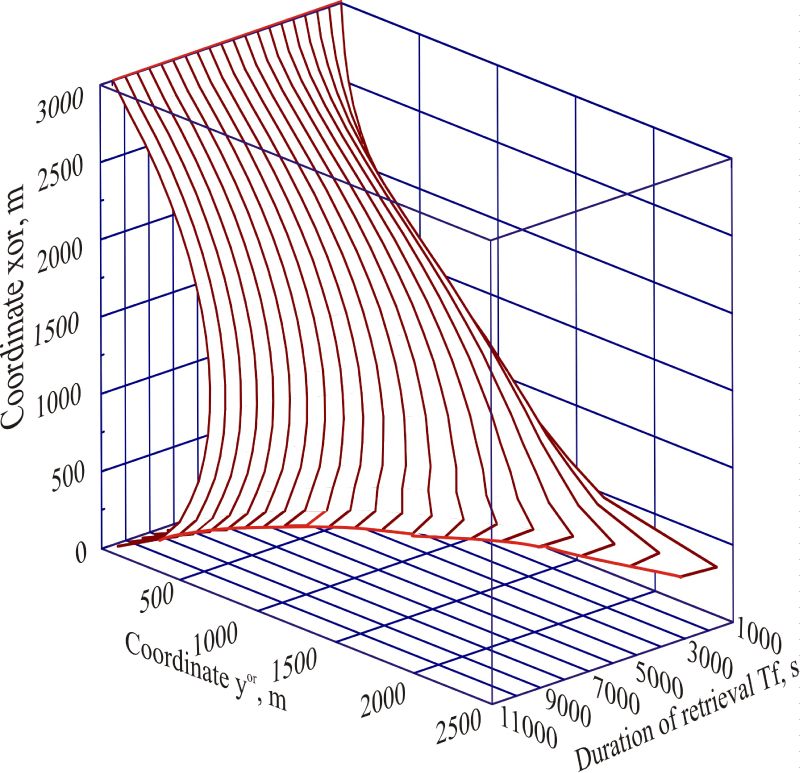
Figure 3: Programmed trajectories of...
Programmed trajectories of body 1 during retrieval vs. retrieval duration and time.
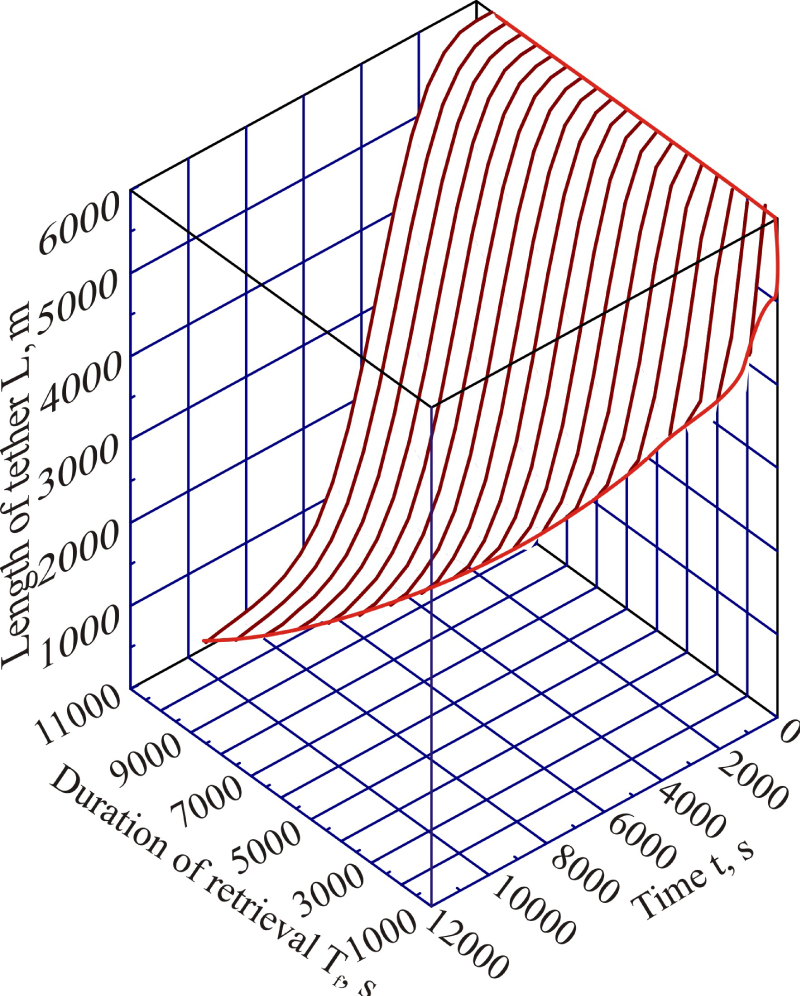
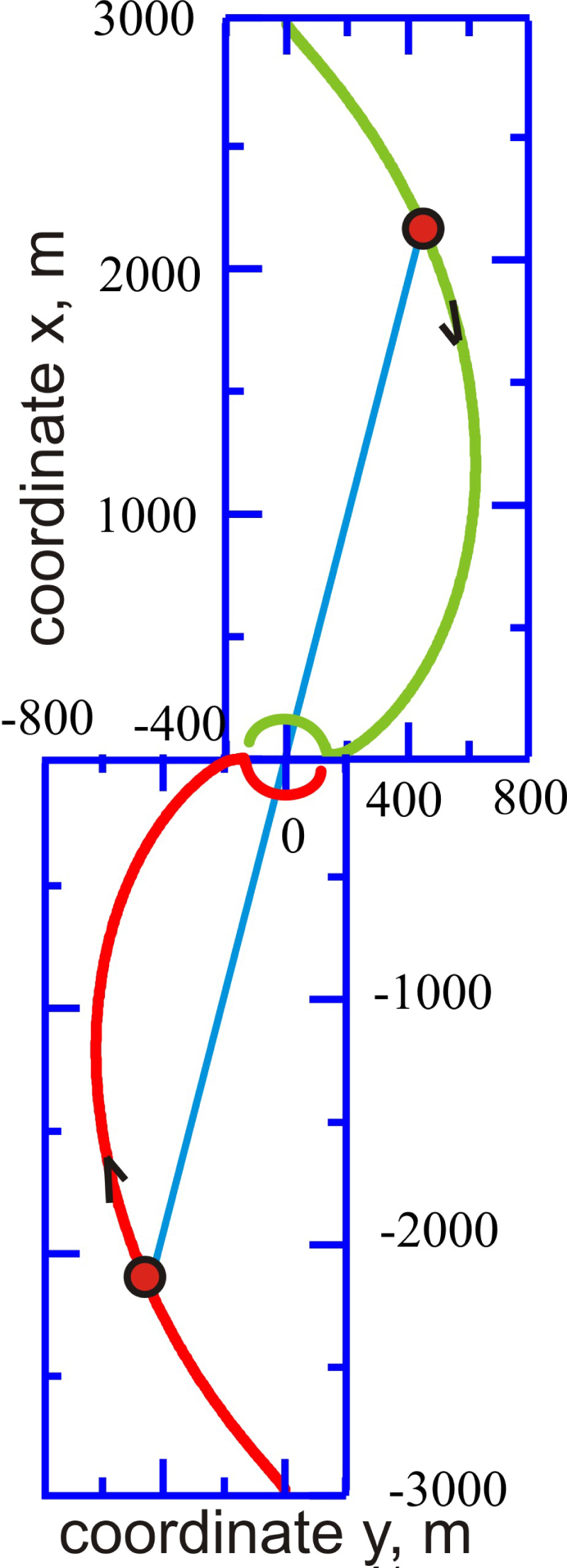

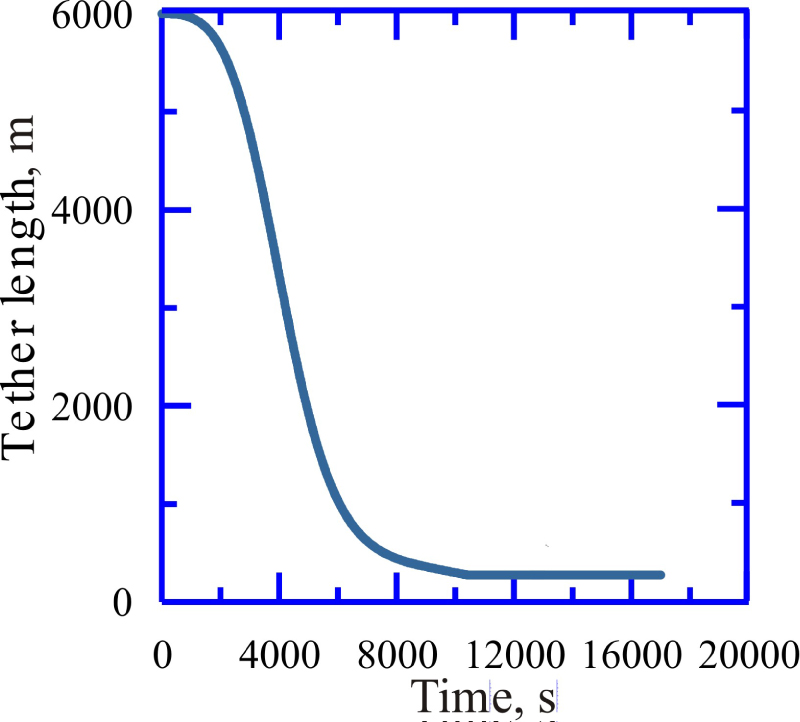
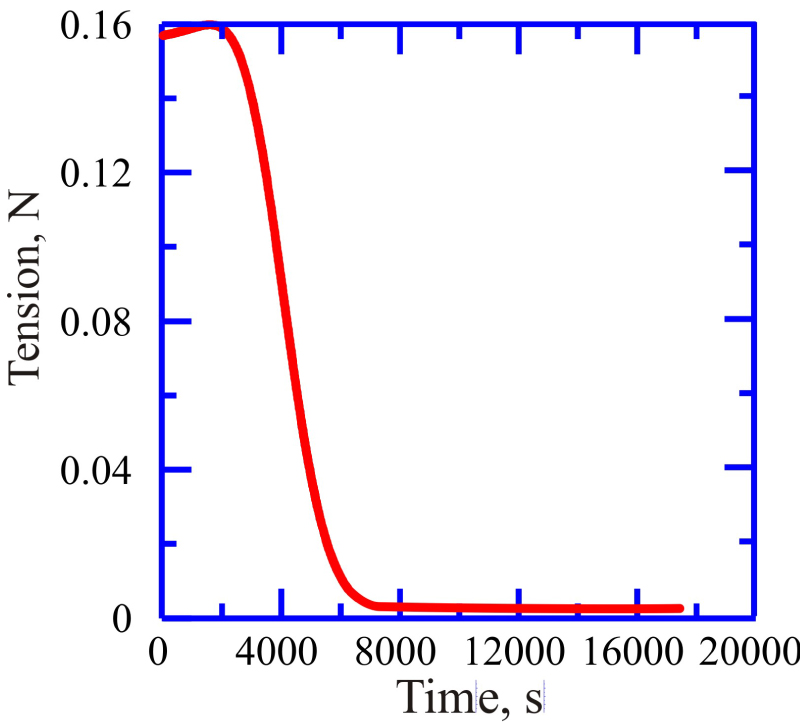
Figure 8: Angle and angular...
Angle and angular velocity of tether libration vs. time during two stages.
References
- Beletsky VV, Levin EM (1993) Dynamics of space tether systems. Univelt, San Diego.
- Levin EM (2007) Dynamic analysis of space tether missions. Univelt, San Diego.
- Panfeng Huang, Zhongjie Meng, Jian Guo, Fan Zhang, Jia Cai, et al. (2017) Dexterous tethered space robot: Dynamics, measurement, control and experiment. IEEE 53: 1452-1468.
- Aslanov VS, Ledkov AS (2012) Dynamics of Tethered Satellite Systems. Elsevier, 356.
- AE Zakrzhevskii (2015) Method of deployment of a space tethered system aligned to the local vertical. The Journal of the Astronautical Sciences 63: 221-236.
- Fleurisson EJ (1990) A Feedforward/Feedback approach to retrieval of a tethered sub-satellite. Massachusetts Institute of Technology.
- Steindl A, Troger H (2003) Optimal control of deployment of a tethered subsatellite. Nonlinear Dynamic 31: 257-274.
- Steindl A (2016) Time optimal control for the deployment of a tethered satellite allowing for a massive tether. Meccanica 51: 2741-2751.
- Zakrzhevskii AE, Pirozhenko AV (2007) Motion Parameters of an electrodynamic tether in orbit. International Applied Mechanics 43: 335-343.
- Alpatov AP, Beletsky VV, Dranovskii VI, Khoroshilov VS, Pirozhenko AV, et al. (2010) Dynamics of tethered space systems. Advances in engineering. CRC Press, Boca Raton.
- Padgett DA, Mazzoleni AP (2007) Analysis and design for nospin tethered satellite retrieval. Journal of Guidance, Control, and Dynamics 30: 1516-1519.
Author Details
AE Zakrzhevskii*
Space Research Institute, NAS&SSA of Ukraine, Academic Glushkov Prospect, Ukraine
Corresponding author
AE Zakrzhevskii, Professor, Leading Scientist, Space Research Institute, NAS&SSA of Ukraine, Academic Glushkov Prospect, 40, Building 4/1, Kiev, Ukraine.
Accepted: February 14, 2018 | Published Online: February 16, 2018
Citation: Zakrzhevskii AE (2018) Feed-Forward Control for Retrieval Mode of Space Tethered Systems. Int J Astronaut Aeronautical Eng 3:013.
Copyright: © 2018 Zakrzhevskii AE. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Abstract
The object of this research is a space tether of two bodies connected by a flexible massless cable. The research objective is extension of developed by the author a novel approach to the building of the feed-forward control for the deployment mode of space tethers to the mode of their retrieval. It allows developing the feed-forward control of the tether length or tether tension that provides desired change of the angular momentum of the tether under the effect of the gravitational torque to the value, which corresponds to the magnitude of the tether angular momentum in the terminal state. The given example of application of the approach to the mode of tether retrieval demonstrates the simplicity of use of the method in practice.
Keywords
Space tether, Mode of retrieval, Numerical simulation
Introduction
The volume of publications devoted to research of various aspects of operation of space tethered systems (STS) is very large. In-depth analysis of potential STS applications is conducted in the Refs [1-3]. Among the problems concerned with the STS, a special case is the problem of retrieval of a tether connecting two space objects. A large number of publications are devoted to this problem. These publications differ by the physical model of the tether and character of the control.
Many of authors consider the problem of tether retrieval as somewhat opposite to the deployment problem [4]. On the other hand, both these modes of motion can be considered as a process of controlled change of the tether inertial properties for the purpose of putting the tether in the prescribed state. There are many various methods for deployment and retrieval of tethers. They can use means of both the propulsive force of thrusters, and gravitational and inertial forces. The tension of a tether may be used as a controlling force. The most simple and reliable method is the method based on using of the gravitational force field. The main objective of the most scenarios of the tether operating is control of its angular momentum, which defines modes of tether motion. Deployment of a tether at the expense of a jet force is less preferable, since it demands considerable fuel expenditure, and complicates the system essentially.
The majority of known methods used for construction of control laws of a state of a space tether are based on attempts to match some control law, allowing solving the problem in view. Thus it appears more often that use of such a control leads to appearance of undesirable effects. So, Kissel's law for deployment or law of exponential deployment result in the tether deployment with alignment to a local vertical with appearance of essential longitudinal oscillations. The author reviews in [5] known to date laws of control applicable for the deployment mode and compares their merits and demerits.
The mode of the tether retrieval has its features. One of them is transition in rotational mode at a rapid reeling of the cable. In [6] it is approved that the retrieval dynamics of the TSS are unstable and open loop retrieval by itself is not reasonably practical. Actually, it is not so, if to take into account the theorem of change of the angular momentum.
It is necessary to develop such a scenario of deployment or retrieval, which does not lead to undesirable consequences such as winding of a cable on the spacecraft body at fast retrieval of the tether.
The method developed by the author in [5] is more preferable from the point of view of maintenance of the desirable properties of terminal conditions of a tether. The method is based on the solution of the inverse problem of mechanics under control of fulfillment of the theorem of change of the angular momentum of a tether under the effect of the gravitational torque.
Mathematical Model of System
Without loss of generality of the problem statement, one can choose two equal point masses connected by a flexible massless cable as the tether model. Neglecting the sizes of tip bodies is justified by the fact that motion modes, in which a cable can be wound up around tip bodies, are not considered here. Neglecting the mass of a cable is justified for tethers with a cable not conducting an electric current that are made of modern light materials. Besides, the experience of the previous researches, in particular, the analysis of the results reported in [7,8], is that the controlled motion of continuum systems with the massive cable described by partial differential equations, practically does not differ from that of tethers whose mass is concentrated in the tip bodies. The difference in location of the center of gravity and center of mass of a tether can be neglected also, as the distance between these points is hardly more than 1 m, when the length of the tether disposed along the local vertical is equal to 5 km [9]. As a result, one may consider that the mass center of the tether moves in a circular orbit around the Earth. We suppose also that the tether is aligned to the local vertical at the initial instant. Further, we will name the top body "body 1".
For convenience of the further description of the tether dynamics, let us introduce the right-hand orbital frame of reference (Figure 1). In this coordinate frame, the axis always points from the Earth's center along the position vector of the tether mass center as it moves through the orbit, the axis is normal to the orbital plane, and the axis completes the right-handed orthogonal triad. Note that the and directions correspond to the in-plane motion, and direction corresponds to the out-of-plane motion. The pitch angle defines deviation of the cable from the local vertical in the orbital plane. The roll angle estimates deviation of the cable from the orbital plane.
The central Newtonian field of forces is chosen as the model of the gravitational field. The position vector of the tether's mass center may be easily determined in the inertial frame of reference, if the orbit parameters and position of the tether's mass center are known. Accordingly, the position vectors of the point masses with respect to the point C can be defined simply by their projections in the orbital frame of reference: , . Let us choose these projections together with their time derivatives in the orbital frame of reference as the phase variables of the problem.
For simulation of the tether controlled motion in the mode of retrieval, the tethered system is modeled using the Hill-Clohessy-Wiltshire (HCW) equations (1) that describe the relative motion of the tip point masses with respect to the tether mass center [10].
Following the traditional derivation, assuming the circular orbit, and taking into account the tether tension, the HCW equations can be written as follows:
Where are the direction cosines of the position vectors of the point masses in the orbital frame of reference, is the angular velocity of a tether orbital motion, T is the cable tension, mI are the mass of the end bodies. The phase variables of the problem are the projections of the position vectors on the axes of the orbital frame and their time derivatives. For closure of the system of twelve ordinary differential equations of the first order, one must know the expression for the tension force in the cable at each instant of time. This task will be considered later.
Scenario of Tether Retrieval
Let us consider a problem of retrieval of a tether that during the initial instant of time is aligned to a local vertical and has equal masses. In this case . If one begins to decrease the length of the cable, the tether starts rotation round the axis in the positive direction. The faster the cable length will decrease, the faster the tether will rotate. It follows from the theorem of the angular momentum change. This theorem may be written in the following integral form:
or in the differential form
Here is angular momentum of the tether, is the gravitational torque, acting on the tether at its deflection from the local vertical in the orbital plain. As the gravitational torque cannot change the angular momentum of a tether in its orbital motion, it is possible to consider in this equation only as the angular momentum of the angular motion of a tether in the orbital plane together with the orbital frame of reference. Then one can write for motion in the orbital plane .
As a result, tether can enter in a rotation mode in the orbital plane. If this tether consists of a large spacecraft and small probe deployed from it, the cable can be wound on the spacecraft body. In order to avoid such a situation, it is necessary to impose constraints on the law of change of the pitch angle .
Taking into account that the disturbances, which can perturb a tether motion in the orbital plane, are absent in the considered problem formulation, we consider motion only in the orbital plane for description of the retrieval scenario. We will use the full system of the equations of the tether space motion (1) for further numerical simulation. In a case of the plane motion, the position of the point mass m1 is defined by its distance r from the origin of the orbital frame of reference and by the pitch angle , which is measured in the orbital plane from the axis.
Now it is necessary to find such a control law r(t), which results in retrieval of the tether in the orbital plane from the initial length to some small length. At the same time, value of the pitch angle at the end of the mode of retrieval must be not greater than some that make it possible to continue the retrieval further to its termination. The physical interpretation of such a control is the following: the angular momentum of the tether changes during the deployment process under the influence of the gravitational torque to such a vectorial value, which corresponds to the angular momentum of the retrieved tether at the instant t = TF.
The simplest way for deriving the required control laws is to use the equation for the pitch motion of an inextensible tether that changes its length. If to follow Ref. [1] (p. 65), one can write this equation for the case of the tether motion in the orbital plane in the following form:
Where is the value of the angular velocity of motion of the tether mass center in the Earth's circular orbit; is half of the tether length. The equation (4) follows directly from the theorem of change of the angular momentum of mechanical systems in its differential form (3). One can obtain the scalar ODE of the first order with the corresponding initial condition after elementary transformations of Eq. (4):
Its solution at known law has the form
As long as the pitch angle begins to increase from zero at any shortening of the cable, we need to find such a law that must be less than at the instant of termination of the retrieval mode. By analogy with the author's work [5] we will search for this law in the form of a functional series of the seventh order
Such an order of the functional series ensures fulfillment of constraints on the law of change of the pitch angle, which follow from conditions on boundaries of the time interval. We can find factors of this series from these conditions. The order of the series is determined by the number of the limitations imposed on the boundary conditions proceeding from physical reasons. For other problems the order can be different.
Obviously that at the initial instant of time for the problem under consideration the following conditions should be satisfied:
The requirement to align the tether, for example, to the local horizontal at the end of a retrieval mode is satisfied with conditions
But such a terminal condition of the tether is inapplicable owing to a number of reasons. First, a cable tension disappears at such a position of the tether because both tip bodies and the tether mass center are in one orbit. Secondly, the tether will be in a condition of unstable equilibrium in this case, but within the frames of the accepted model it will remain further motionless in orbital frame of reference, if the tether length will be constant. If further to continue shortening of the cable, the tether pitch angle will increase. In case of a tether deployed from massive station, it can lead to cable winding on the basic module. Therefore it is expedient to choose as terminal value of the pitch angle a value that is less than . In a numerical example that is considered below, we choose this value equal to 1.45 rad. As a result, the gravitational torque starts to act on the tether at . The tether enters in a mode of pendulous oscillations from which it will be easier to retrieve the cable finally.
The following conditions should be satisfied at retrieval of the tether from the full length L to the final length LF:
The first of these conditions is fulfilled by the Cauchy problem solution as its initial condition. The second one will be used further for determination of a priori unknown instant of time of the retrieval termination TF. This value will permit to choose the suitable solution of the problem from the manifold of solutions obtained for various TF values.
Two more constraints follow from the condition that the length of the tether is constant at the points t = 0 and t = TF:
Appearance of jerks of tension in a cable is inadmissible both at the initial, and at the final instant of retrieval. It can lead to rotation of tip bodies about their axes and to disappearance of the tension force. In turn, it leads to inadequacy of the used mathematical model. The condition of absence of jerks of tension on boundaries of the interval of retrieval leads to the following relations:
It follows directly from the first of the equations of a tether motion in spherical co-ordinates [11] (motion in the orbital plane)
which for both boundary points gives the direct dependence , in particular, on the tension force T.
Taking into account Eq. (11) one can obtain the following condition from Eq. (5):
The second of conditions (11) taking into account the second of conditions (9) allows one to obtain the following constraint from (5):
At last, after time differentiation of Eq. (5) and using of already derived constraints on , one can obtain the following constraints from the conditions (13):
Thus, for determination of the programmed law of varying in time of the angle , allowing one to solve the problem in view, eight conditions (8), (9), (14) - (16) must be satisfied.
Now one can find the coefficients of the polynomial at :
The law r(t) obtained in accordance with the expression (6) depends on the law , which in turn depends on duration of the retrieval mode TF, and the radius of the orbit of the tether mass center.
Numerical Example
Let us consider further practical realization of the proposed method of development of feed-forward control of the flexible two bodies' space tether for the mode of its retrieval. The following values of parameters of the tether are chosen: The masses of the tip bodies are identical and are equal to 15 kg, the initial length of the tether is 6000 m, and the longitudinal stiffness of the cable is 5000 N. The tether mass center moves in an orbit of radius 7000 km.
Let us show how to find the law r(t) that solves the problem in view. Calculating at different TF values, one can obtain the curves shown in Figure 2.
Here curves show the laws . Each line corresponds to some value of duration TF of the retrieval mode.
To estimate an acceptability of this or that law of programmed motion it is need knowing the law of change of the tether length. This law is easy to obtain, solving the Cauchy problem (3) for set of values TF at known laws
As a result, we find the dependences that are shown in Figure 3.
Here one can see that character of the trajectory of the body 1, which at the initial instant was in the top position, terrifically depends on the retrieval duration. If to try to make the retrieval during 1000 s, the tether terminates this process with length 5026 m. Its angular momentum will be almost unchanging, the tether length also. If one will make retrieval process during 10,000 s, the tether length becomes at the end about 276 m. It is seen in Figure 3.
When the tether enters in the mode of pendulous oscillation under effect of the gravitational torque, the retrieval process may be completed using the same approach. In Figure 3 and Figure 4, one can see that the tether length decreases at first and then the tether must be deployed for satisfaction of the trajectory boundary conditions. The same trajectory at TF = 10,000 s corresponds to monotonous decreasing of the tether length. As a result, one can study an alternative scenario of retrieval for small TF values. The process of retrieval may be stopped at the minimal tether length. Then the tether enters in a mode of pendulous oscillations under effect of the gravitational torque. The next stage of retrieval may start at the instant when the tether passes the local vertical, when its angular momentum is minimal. For calculation of factors of the series (7) it is necessary to know the value of the angular rate of the tether at the instant of its passage through the vertical. This problem may be solved simply enough in the presence of the corresponding measuring equipment and the onboard computer.
The retrieval process may continue in such a way. It may contain a number of stages.
Let us consider further behavior of the tether in the mode of retrieval at TF = 10,000 s. For numerical simulation we will use the equations of HCW (1). If we choose the coordinates of tip bodies and their first time derivatives as phase variables, we must introduce in the model the control of the system using the force of the tether tension T, which can be calculated on each step of integration using the equation (13). One can obtain the value r(t) on each step of integration of the Cauchy problem (5). Its first time derivatives may be determined from (5) after substitution there the expression (7) for and its time derivatives. As a result, we obtain the expression for the tension force T(t), which may be used at numerical integration of the Cauchy problem for HCW equations with help of the Fortran package, written by the author.
The shape of the function is shown in Figure 2 on the interval of time . Such a law for has been chosen for finding of the programmed control of the length of the retrieved cable according to the solution (6) of the Cauchy problem (5). Trajectories of the tether tip body 1 in an orbital plane in the orbital frame of reference are shown in Figure 5. If we know the programmed trajectory of the body 1 vs. time, we can determine the programmed law r(t), where Now we can find the programmed law for tension force T(t) from the Eq. (13). Then we substitute this law in the Eq. (1) and solve the Cauchy problem using appropriate initial condition. As a result, we obtain the trajectories of the tether tip bodies. These trajectories are shown in Figure 5 with the red and green lines.
Here one can see that change of length of the cable stops at the instant t = TF, and the tether enters in the mode of slow pendulous oscillations. The length of the tether is equal to 276 m now, and the period of oscillations with amplitude 1.45 rad is equal to 7540 seconds. The maximum value of the angular rate of the tether in the orbital frame of reference is equal to 0.001853 rad/s. Angular rate of the orbital motion is equal to 0.001078 rad/s in the case under consideration. i.e. at the tether rotation in the direction opposite to rotation of the orbital frame of reference about the axis , there are two instants of time when the tether moves translationally. In view of small length of the tether, it is possible to retrieve completely the remained cable during a short interval of time (for example, 20 seconds) in a vicinity of these instants of time, without appearance of dangerous increases in the angular rate of the tether.
In Figure 6 one can see behavior of the pitch angle during retrieval. After completion of programmed control of the tether length at the instant t = TF, tether enters in the mode of pendulous (librational) oscillations.
In Figure 7, the tether length is shown vs. time during the retrieval mode. Small changes of length of the elastic cable in the mode of pendulous oscillations are not visible in the graph.
The programmed tether tension, which ensures motion of the tether tip bodies on the prescribed programmed trajectories, is shown in Figure 8. It is shown here that the value of the tension force grows as compared with the equilibrium state at the beginning of the retrieval mode. It is necessary for overcoming the inertia force. The force of tension is very small at the end of retrieval because of small length of the tether. Small changes of the cable tension in the mode of pendulous oscillations are not visible in the graph.
For taking into account elasticity of the tether, the correction has been introduced into the computing program for calculating of the tension force. Really, for the flexible tether distance from the point C to the tip body is equal Here rp(t) is the programmed law of r(t) change. In turn, is elongation of the tether in compliance with Hook's law. Therefore, considering quasistatic character of the retrieval mode, it is necessary to calculate Т taking into account this fact and to introduce the correction in calculation of the programmed law In the capacity of a current value it is quite admissible to use its value calculated on the previous step of integration. Then the tension force may be calculated taking into account the corrected value
Conclusions
Summing up, it is possible to say that a new approach to the control of tethers deployment is extended on the solution of the problem of retrieval of an elastic two bodies space tether in a circular orbit. This approach is based on use of the theorem on change of the angular momentum. From the physical point of view, the purposeful change of the angular momentum of a tether at the expense of its interaction with the Earth's gravitational field is proposed, allowing one to satisfy a number of additional requirements to quality of the dynamic processes in the flexible space system. From the point of view of the control theory, the method of construction of the feed-forward control of the tether length is developed, allowing one to retrieve an elastic tether of two bodies from its initial state without excitation of longitudinal oscillations because the developed control law is very smooth in time and does not contain the elements, which can cause such oscillations. The tether length decreases here changing the tether pitch angle under the law presented by the polynomial of the seventh order. Factors of this polynomial are defined from the physical reasons, which provide the prescribed quality of the tether retrieval, in particular, absence of longitudinal oscillations of the tether. The given example of application of the developed approach to a mode of retrieval of a particular tether demonstrates the simplicity of use of the method in practice.